Firstly, R.I.P. to Biggie Smols aka The Notorious Ruth Bantam Ginsburg, the last surviving member of our “Bad Hen Records” crew consisting of Vanilla Ice, Suge White, and Puffy Combs. She was an adorable birb with a fantastic singing voice who absolutely loved hatching babies and is sorely missed.


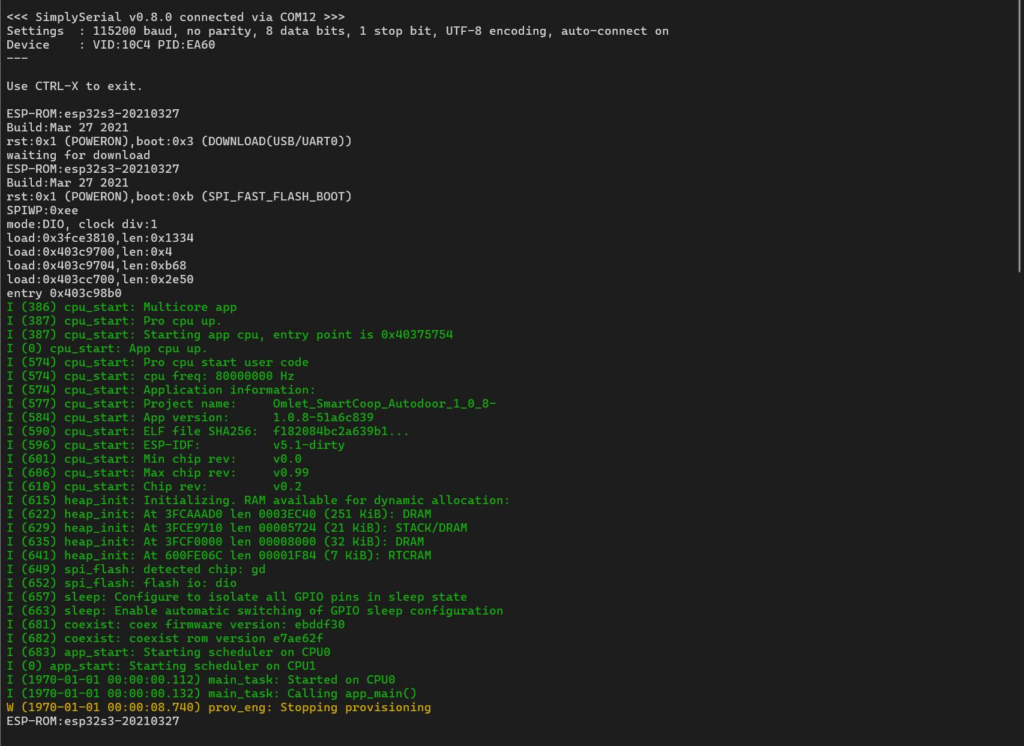
Progress on automating the coop door has been a slog. My main problem is that I keep crashing CircuitPython. It seems to be related to asyncio and frequent i2c activity, but troubleshooting with the developers has been painful because it takes days to happen, CP has no native debugging capabilities, and they do not provide debugging builds.
Probably I need to throw in the towel on CircuitPython and switch to MicroPython or C.
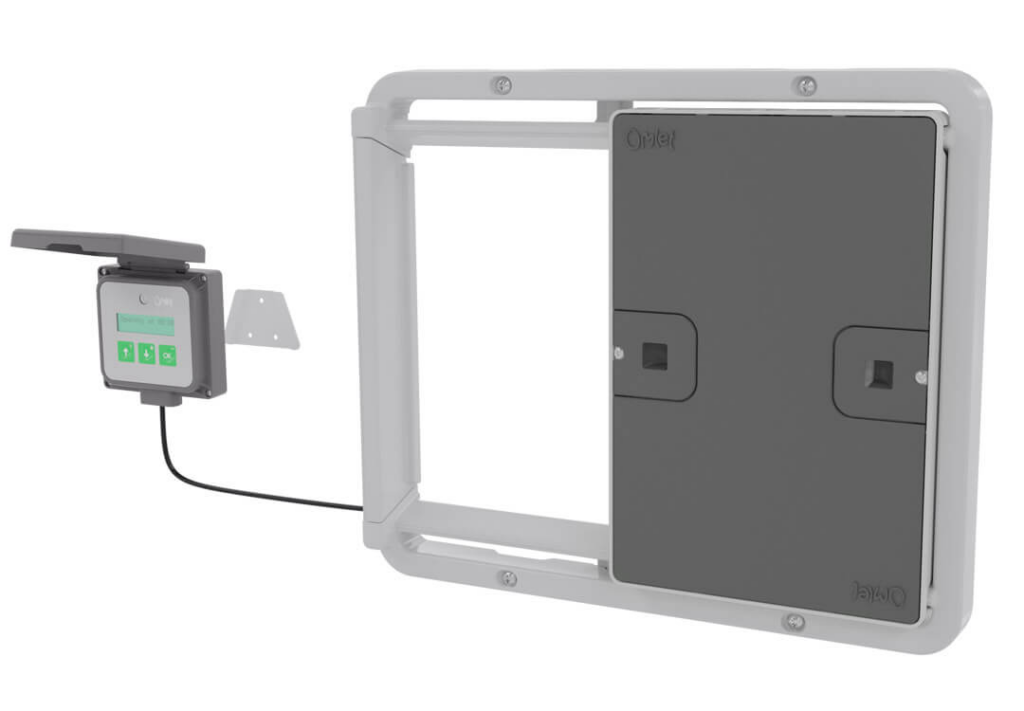
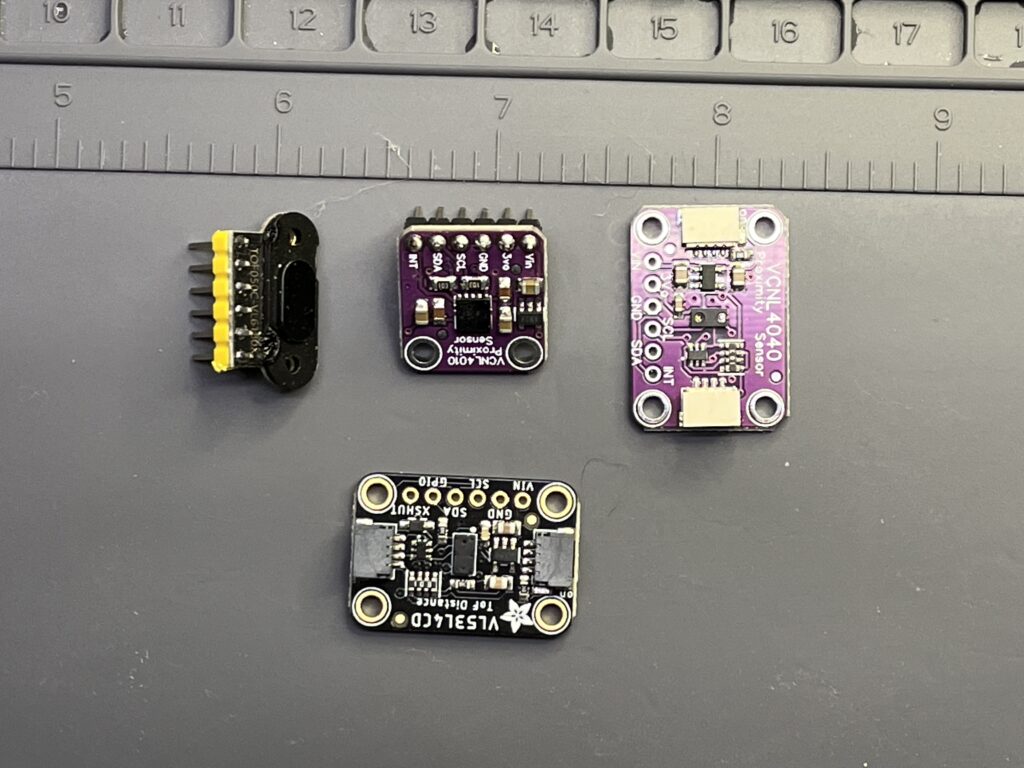
I’ve also been experimenting with using Time-of-Flight sensors to track the door’s precise position.
The upside to that method, aside from the obvious, would be that it can be completely concealed by the frame and should be reasonably protected from water and dust.
I’ve gone through a bunch of sensors trying to avoid the VL53L4CD / VL53L4CX because they’re pricey @ +/- $4 for bare chips or $15 + S&H for a full board from Adafruit, but so far none of the lesser chips I can get on a board for $1-$3 on AliExpress have been suitable for the required minimum and maximum distance measurements. So I guess that is what it is.
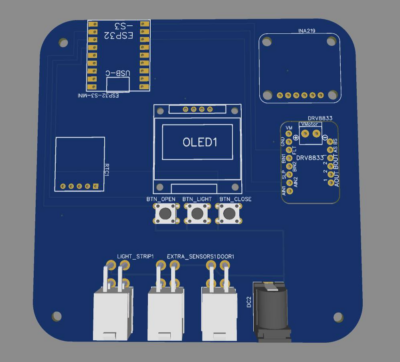
I’ve also been researching how to do light control. The PCBs I had made have a provision for controlling 5v WS2812b LED strips but it wasn’t well thought out and I don’t believe it will deliver enough power. I need a MOSFET in there, power regulators, I want to support the Omlet accessory light, and being able to run PWM LED strips at 12v or 24v seems better than 5v WS2812b.
I also picked up some UART-based LoRa modules that I want to support. I have sufficient Wi-Fi coverage outdoors but I figure that could be a challenge for many people, and a differentiator from Omlet’s new Wi-Fi controller.
The final change I want to make is switching to an ESP board with more GPIOs and breaking out the excess ones so that someone could add hardware capabilities I haven’t considered yet.
Sometime next week I’ll be validating that the i2c bus / ToF sensor functions with 2-meters worth of cable, and then I’ll start designing a new revision of the PCB that incorporates all of that.